

Equipment
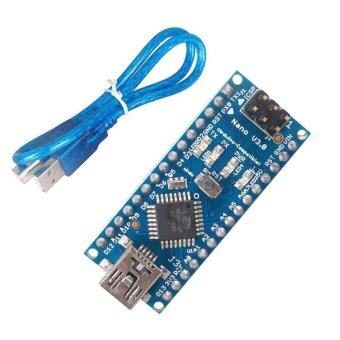
1. Arduino NANO
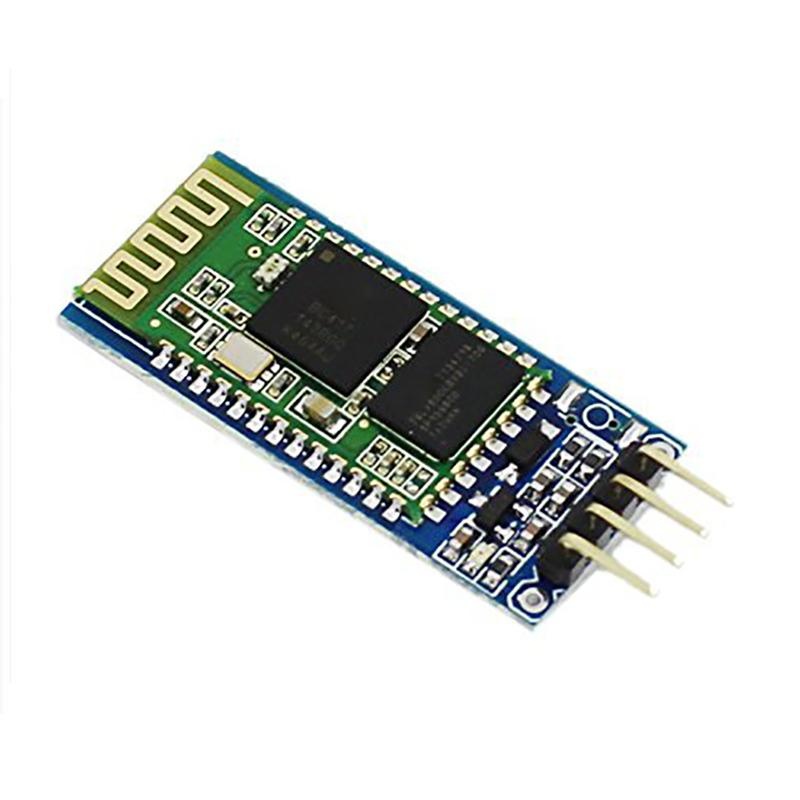
2.HC-06 Bluetooth module
3. 4 relays

code
#include<SoftwareSerial.h>
SoftwareSerial mySerial(10,11);//rx,tx
//const int LDR=A0;
//int xx;
int Light = 2;
int Loundry = 3;
int TV = 4;
int Radio = 5;
char receivedChar;
void setup() {
// Serial.begin(19200);
mySerial.begin(9600);
pinMode(Light,OUTPUT);
pinMode(Loundry,OUTPUT);
pinMode(TV,OUTPUT);
pinMode(Radio,OUTPUT);
digitalWrite(Light,HIGH);
digitalWrite(Loundry,HIGH);//setting motorA's directon
digitalWrite(TV,HIGH);
digitalWrite(Radio,HIGH);//setting motorB's directon
}
void loop()
{
// xx = analogRead(LDR);
// mySerial.print(xx);
//Serial.println(xx);
// delay(500);
while (!mySerial.available()); // stay here so long as COM port is empty
receivedChar = mySerial.read();
if (receivedChar == 'A') {
//digitalWrite(ENA,LOW);
// digitalWrite(ENB,LOW);// High is start driving car
digitalWrite(Light,LOW);
Serial.println(receivedChar);
}
if (receivedChar == 'B') {
// digitalWrite(ENA,LOW);
// digitalWrite(ENB,LOW);// High is start driving car
digitalWrite(Loundry,LOW);
}
if (receivedChar == 'C')
{
// digitalWrite(ENA,LOW);
// digitalWrite(ENB,LOW);// High is start driving car
digitalWrite(TV,LOW);
} // if it is a 3 flash the LED
if (receivedChar == 'D') {
//digitalWrite(ENA,LOW);
//digitalWrite(ENB,LOW);// High is start driving car
digitalWrite(Radio,LOW);
} // if it is a 4 print out lots of sensor data
if (receivedChar == 'E') {
digitalWrite(Light,HIGH);
}
if (receivedChar == 'F') {
digitalWrite(Loundry,HIGH);//setting motorA's directon
}
if (receivedChar == 'G') {
digitalWrite(TV,HIGH);
}
if (receivedChar == 'H') {
digitalWrite(Radio,HIGH);//setting motorB's directon
}
}
mit



ไม่มีความคิดเห็น:
แสดงความคิดเห็น